2020-06-02 24 Просмотров
Представьте тот момент, когда рука робота сможет достать один картофельный чипс из пачки не сломав его. Чтобы провернуть такой фокус ему нужны сложные датчики на руке – давления и проприоцепции (определения положения своего тела в пространстве, иногда его называют кинестезией). Такой вид «ощущений» сейчас недоступен в робототехнике, но две команды из массачусетского технологического университета работают над тем, чтобы исправить это. Их исследования направлены на то, чтобы дать роботам возможность «почувствовать» что они взяли в руку и сколько силы нужно приложить без разрушения объекта.
Одна из команд сделала своего робота на основе предыдущих работ учёных из массачусетского технологического и гарвардского университетов. Та «рука» имела конусообразную форму и использовала способ захвата подобный венериной мухоловке. При этом она способна удерживать вес в сто раз больше собственного. Новая команда доработала это устройство добавив сенсоры, которые позволяли поднимать деликатные предметы подобные картофельному чипсу, а так же классифицировать каждый поднятый объект, «запоминая» его.
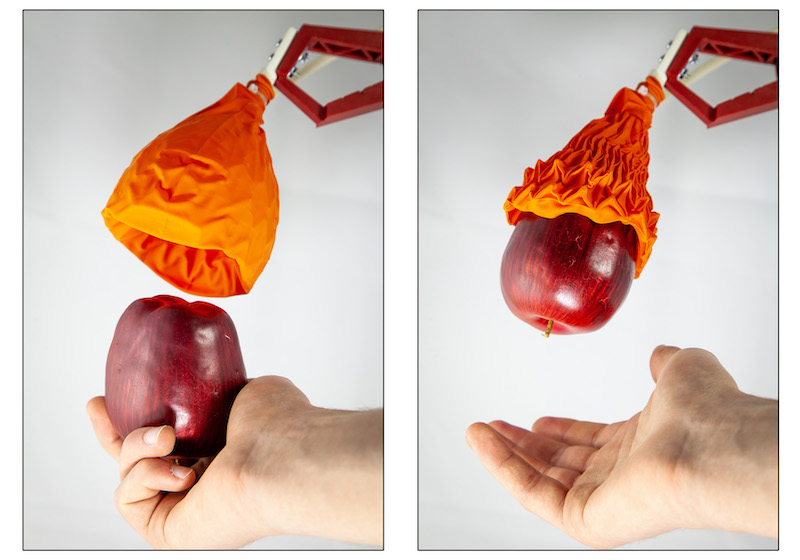
Команда инженеров добавила тактильные сенсоры, сделанные из надувных латексных «шариков», подключённых к преобразователям давления. Затем специальный алгоритм сообщал захвату сколько силы нужны применить. На данный момент учёным удалось протестировать свой захват на различных предметах – от тяжёлых бутылок и банок до яблок, зубных щёток и пакетов с печеньем.
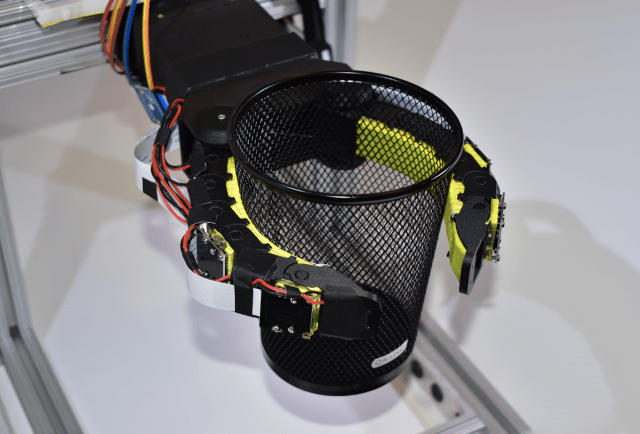
В это же время, вторая группа разработчиков создала мягкий робопалец, который назвала «GelFlex», который использует встренные камеры и машинное обучение для создания тактильных ощущений и проприоцепции. Захват выглядит как старый ухват для русской печи, только гораздо более технологичный. Каждый из «пальцев» имеет камеру на своём конце и на середине сгиба. Эти камеры наблюдают за происходящим впереди и сбоку, а нейронная сеть использует данные с камер, позволяя захвату брать предметы различных форм.
Обе команды собираются представить свои разработки на международной конференции по робототехнике и автоматизации в этом году.
Источник: chudo.tech.





